

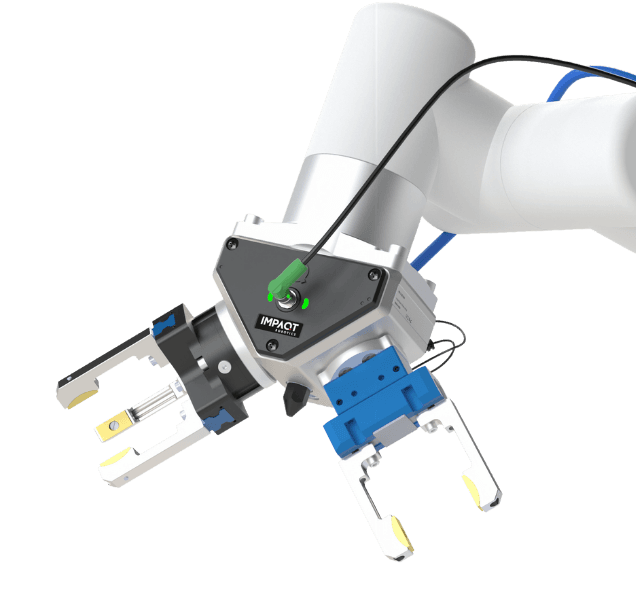

Dual pneumatic EOAT interface for high-payload applications
pneumagiQ PQ9020 is a universal pneumatic EOAT interface that mounts two pneumatic tools at a 90° offset. Designed for high-payload applications, it supports up to 20 kg while simplifying dual-tool integration on robots.


90° EOAT Offset
Ideal for machine tending

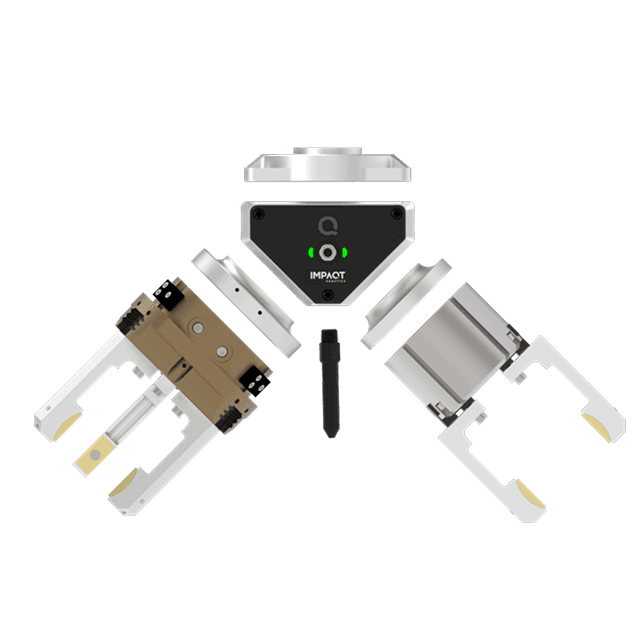
4 Sensor Ports
No more long wires for sensors

1100 grams
Maximize robot payload utilization

20 kg Payload
High payload capacity

Air Blow-Off Port
Easily clears chips, oil, and burrs
Scroll to view product
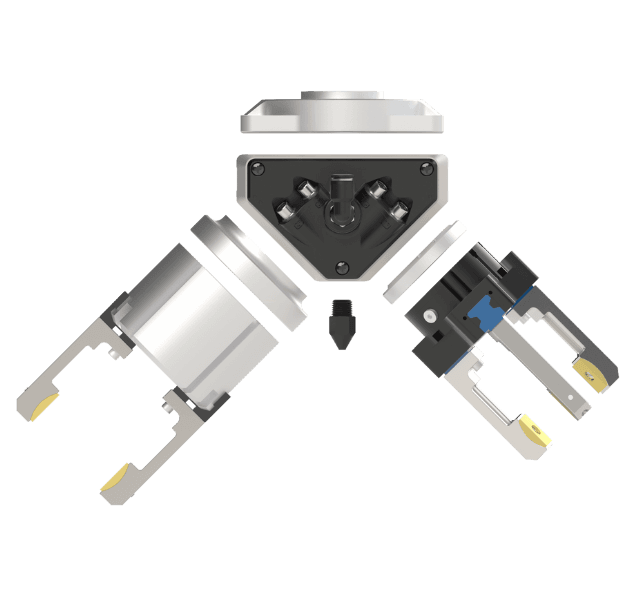
PQ9020 is designed as part of the pneumagiQ platform, providing a standardized and brand-agnostic interface for pneumatic EOAT. This allows integrators and end users to mount and operate different pneumatic tools on the same interface, without being locked into a specific EOAT brand or application.
By using a common platform, PQ9020 enables pneumatic tooling to be reused, reconfigured, or replaced as application requirements change. This reduces engineering effort, shortens deployment time, and makes it easier to adapt robotic cells to new tasks without redesigning the EOAT setup.
PQ9020 is available with dedicated plugins for both Universal Robots and FANUC CRX robots, enabling full plug-and-play integration within each robot environment. This allows users to configure and operate pneumatic tooling directly from the robot interface without additional controllers or complex setup.
For other robots, cobots, gantries, and custom-built machines, PQ9020 supports Modbus RTU (RS-485). This widely used industrial communication protocol is an intentional design choice that ensures compatibility across a broad range of automation platforms.
Standard, globally available converters can be used to interface RS-485 with other communication protocols such as TCP/IP or IO-Link when required.












